

")
Lo scorso 18 novembre si è tenuto, nell’ambito della Fiera Interpoma di Bolzano, un incontro dedicato alla raccolta robotizzata: un’opportunità per conoscere startup e aziende che stanno sviluppando e proponendo soluzioni altamente tecnologiche al fine di rispondere alle esigenze del mondo produttivo in merito alla carenza di manodopera.
Il professor Manfrini, nell’introdurre i lavori, ha accennato all’evoluzione nei secoli della forma dell’albero da frutto, che si è adattata via via alle esigenze della lavorazione meccanica: applicando queste tecnologie l’agricoltore potrebbe beneficiare non solo della riduzione dei costi della forza lavoro ma anche veder ridotti i rischi di infortuni connessi alla propria attività lavorativa.
Sei aziende, provenienti da tutto il mondo (Italia, Usa, Israele, Australia ed Olanda) hanno poi presentato l’idea progettuale, l’approccio tecnologico, lo stato di sviluppo del progetto e le prestazioni in campo della propria attrezzatura robotizzata: per primo Peter Ferguson di Advanced Farm, azienda statunitense che, dopo aver sviluppato macchine per la raccolta robotizzata delle fragole, punta ora ad immettere sul mercato analoghe attrezzature destinate alla raccolta delle mele. Tali robot, dotati di guida autonoma, sarebbero in grado di raccogliere 1.000/1.500 frutti all’ora grazie a 6 bracci automatizzati dotati di morbide ventose. Attualmente è in atto, grazie alla collaborazione con agricoltori dello stato di Washington, la stabilizzazione delle macchine per consentire l’attività anche in presenza di pendenze o fondo irregolare.
Riflettori anche sull'Italia
Dopo Ferguson è stato il turno di Elia Bruni, CEO dell’italiana Aigritec che ha sottolineato come le operazioni di raccolta, trattamento fitosanitario e potatura siano le più onerose per il produttore e che la gestione di precisione di tali fasi possa determinare un incremento della resa produttiva (anche del 40%) riducendo il consumo di acqua e delle emissioni di anidride carbonica in atmosfera. I robot, a 8 bracci, avrebbero una velocità paragonabile a 4 raccoglitori, effettuando uno stacco ogni sei secondi per braccio e quindi raggiungendo i 3-4.000 stacchi all’ora. Le attrezzature, attualmente costose, potrebbero essere gestite tramite gruppi d’acquisto.

Avi Kahani, fondatore di FF Robotics israeliana, invece, ha realizzato un macchinario a 12 bracci, che in un futuro potrebbe essere utilizzabile non solo per la raccolta dei frutti ma anche per altre operazioni di gestione del meleto, a partire dal diradamento e dalla potatura. Il tasso di danneggiamento dei frutti è attualmente inferiore al 5%, un ottimo risultato, ma si reputa necessaria la collaborazione con i coltivatori per ottimizzare le forme di allevamento delle piante e definire quanto prodotto si vuole far raccogliere alle macchine e quanto si può lasciare alla raccolta manuale: attualmente i frutti raccolti dal robot rappresentano il 70% di quelli presenti, ma si può prevedere di raggiungere il 90%.
Danneggiamenti ridotti al minimo
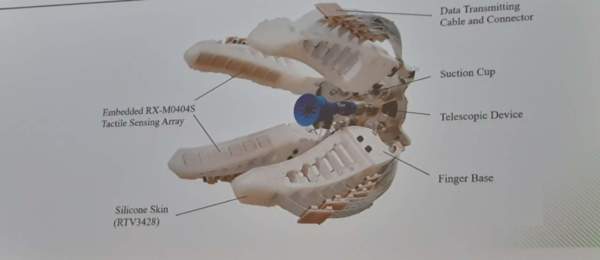
Chao Chen, dell’australiana Monash University, ha presentato il sistema Mars (Monash apple retrieving system) il quale, grazie ad una pinza a tre dita ed una ventosa centrale, è in grado di staccare delicatamente i frutti dall’albero. L’attuale prestazione del braccio è di 5-9 stacchi al minuto, ossia quasi 600 stacchi all’ora per braccio con danni alla buccia inferiori all’1%. Aumentando il numero dei bracci la produttività aumenterebbe ma proporzionalmente salirebbero anche i costi dell’attrezzatura.
È stata poi la volta di Han Smith, della casa olandese di Munckhof che ha presentato la raccoglitrice automatica realizzata in collaborazione con l’Università di Wageningen. Tale attrezzatura, che sarà sul mercato nel 2024, è stata realizzata utilizzando pezzi già esistenti, prodotti da aziende con esperienza nei vari settori. Oltre a sviluppare l’attrezzatura è in atto una collaborazione con i frutticoltori per adeguare la pianta alla raccolta meccanica, riducendo lo spessore della parete e rendendo più efficiente il processo. Ad oggi la macchina può lavorare 16 ore al giorno con uno stacco ogni 5 secondi, il braccio meccanico può lavorare in copresenza con raccoglitori manuali ma, per aumentare la produttività, è previsto lo sviluppo di modelli con 8 bracci.
Tornando all’Australia è intervenuto Hunter Ray di Ripe Robotics che ha descritto il proprio prototipo sviluppato e testato in alcuni impianti di mele ad Adelaide. La macchina prevederà 4 bracci di raccolta dislocati a diverse altezze, la sfida da vincere è far riconoscere alla macchina il giusto frutto da raccogliere.
In volo nel frutteto
E a finire Yaniv Maor di Tevel Aerobotics Technologies che ha sviluppato robot autonomi volanti per la raccolta dei frutti. I droni, dotati di un braccio che termina con una ventosa, sono in grado di staccare le mele selezionando i frutti sulla base di parametri di qualità. La produttività non appare fattore limitante in quanto è possibile aumentare il numero dei droni collegati al robot: oltre alla raccolta è possibile prevederne l’utilizzo in fase di potatura (tramite una specifica forbice installata sul braccio), in fase di impollinazione e per un’irrorazione di precisione. L’attività di messa a punto dell’attrezzatura di Tevel su mele ha preso avvio in Piemonte, presso l’azienda Rivoira, ma sono in corso test su altre referenze ortofrutticole presso i soci di Apo Conerpo.

Tanto lavoro resta da fare ancora, ma il settore è in forte fermento, con tante idee da condividere. E riguardo ai dati dichiarati relativi alle prestazioni in campo (numero di frutti raccolti per unità di tempo o precisione nelle operazioni di raccolta) tutti i relatori intervenuti hanno sottolineato che il miglioramento è solo questione di tempo: i risultati dei robot sono destinati a migliorare rapidamente poiché il sistema migliora acquisendo ed integrando i dati che man mano vengono raccolti. Ne vedremo delle belle.





{kind=link}